打开微信,使用扫一扫进入页面后,点击右上角菜单,
点击“发送给朋友”或“分享到朋友圈”完成分享
1.下载源代码
github地址:https://github.com/Cambricon/CNStream
2.进入到目录
cd /cnstream/samples/detection-demo
3.在后处理postprocess中增加去雾后处理的Dehazepost.cpp
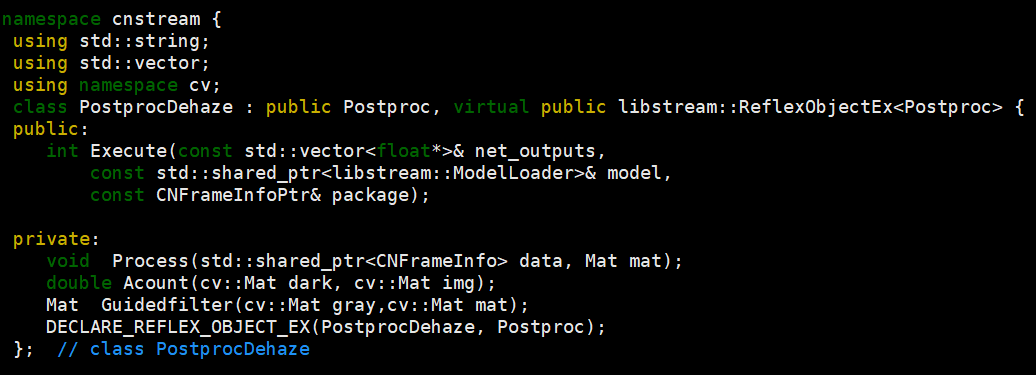
定义自己的类PostprocDehaze继承父类Postproc,并且实现父类的虚函数Execute。(完整代码如下)
int PostprocDehaze::Execute(const std::vector& net_outputs, const std::shared_ptr& model, const CN InfoPtr& package)
#include "postproc.hpp"
#include #include #include #include #include #include #include #include #include #include #include "cnbase/cntypes.h"
namespace cnstream {
using std::string;
using std::vector;
using namespace cv;
class PostprocDehaze : public Postproc, virtual public libstream::ReflexObjectEx {
public:
int Execute(const std::vector& net_outputs,
const std::shared_ptr& model,
const CNFrameInfoPtr& package);
private:
void Process(std::shared_ptr data, Mat mat);
double Acount(cv::Mat dark, cv::Mat img);
Mat Guidedfilter(cv::Mat gray,cv::Mat mat);
DECLARE_REFLEX_OBJECT_EX(PostprocDehaze, Postproc);
}; // class PostprocDehaze
Mat PostprocDehaze::Guidedfilter(cv::Mat img,cv::Mat mat){
Mat gray;
int height = img.rows;
int width = img.cols;
cvtColor(img,gray,CV_BGR2GRAY);
gray.convertTo(gray,CV_32FC1);
for (int i = 0; i<height; i++)
{
for (int j = 0; j<width; j++)
{
gray.at(i, j)=gray.at(i, j)/255.0;
}
}
int r = 60;
double eps = 0.0001;
Mat mean_I;
mean_I.convertTo(mean_I,CV_32FC1);
boxFilter(gray,mean_I,-1,Size(r,r),Point(-1,-1),true,BORDER_DEFAULT);//方框滤波器来模糊一张图片
Mat mean_p ;
mean_p.convertTo(mean_p,CV_32FC1);
boxFilter(mat,mean_p,-1,Size(r,r),Point(-1,-1),true,BORDER_DEFAULT);
Mat mean_Ip;
mean_Ip.convertTo(mean_Ip,CV_32FC1);
Mat GM;
GM.convertTo(GM,CV_32FC1);
GM=gray.mul(mat);
boxFilter(GM,mean_Ip,-1,Size(r,r),Point(-1,-1),true,BORDER_DEFAULT);
Mat cov_Ip;
cov_Ip.convertTo(cov_Ip,CV_32FC1);
Mat MM;
MM.convertTo(MM,CV_32FC1);
MM=mean_I.mul(mean_p);
cov_Ip = mean_Ip - MM;
Mat mean_II;
mean_II.convertTo(mean_II,CV_32FC1);
Mat GG;
GG.convertTo(GG,CV_32FC1);
GG=gray.mul(gray);
boxFilter(GG,mean_II,-1,Size(r,r),Point(-1,-1),true,BORDER_DEFAULT);
Mat var_I;
var_I.convertTo(var_I,CV_32FC1);
Mat II;
II.convertTo(II,CV_32FC1);
II=mean_I.mul(mean_I);
var_I = mean_II - II;
Mat a;
a.convertTo(a,CV_32FC1);
a = cov_Ip/(var_I + eps);
Mat b;
b.convertTo(b,CV_32FC1);
Mat AM;
AM.convertTo(AM,CV_32FC1);
AM=a.mul(mean_I);
b = mean_p - AM;
Mat mean_a ;
mean_a.convertTo(mean_a,CV_32FC1);
boxFilter(a,mean_a,-1,Size(r,r),Point(-1,-1),true,BORDER_DEFAULT);
Mat mean_b ;
mean_b.convertTo(mean_b,CV_32FC1);
boxFilter(b,mean_b,-1,Size(r,r),Point(-1,-1),true,BORDER_DEFAULT);
Mat q;
q.convertTo(q,CV_32FC1);
Mat MG;
MG.convertTo(MG,CV_32FC1);
MG=mean_a.mul(gray);
q = MG + mean_b;
q=cv::max(q,0.1); return q;
}
double PostprocDehaze::Acount(cv::Mat dark, cv::Mat img){
double sum=0; //像素点符合条件A的和
int pointNum = 0; //满足要求的像素点数
double A = 0; //大气光强A
double pix =0; //暗通道图中照亮度的前0.1%范围的像素值
CvScalar pixel; //按图中符合A的点,在雾图中对应的像素
float stretch_p[256], stretch_p1[256], stretch_num[256];
int height = img.rows;
int width = img.cols;
//清空三个数组,初始化填充数组元素为0
memset(stretch_p, 0, sizeof(stretch_p));
memset(stretch_p1, 0, sizeof(stretch_p1));
memset(stretch_num, 0, sizeof(stretch_num));
IplImage tmp = IplImage(dark);
CvArr* arr = (CvArr*)&tmp;
IplImage tmp1 = IplImage(img);
CvArr* arr1 = (CvArr*)&tmp1; for (int i = 0; i<height; i++)
{
for (int j = 0; j<width; j++)
{
double pixel0 = cvGetReal2D(arr, i, j);
int pixel = (int)pixel0;
stretch_num[pixel]++;
}
} //统计各个灰度级出现的概率
for (int i = 0; i<256; i++)
{
stretch_p[i] = stretch_num[i] / (height*width);
} //统计各个灰度级的概率,从暗通道图中按照亮度的大小取前0.1%的像素,pix为分界点
for (int i = 0; i<256; i++)
{
for (int j = 0; j 0.999)
{
pix = (double)i;
i = 256;
break;
}
}
}
for (int i = 0; i< height; i++)
{
for (int j = 0; j pix )
{
pixel = cvGet2D(arr1, i, j);
pointNum++;
sum += pixel.val[0];
sum += pixel.val[1];
sum += pixel.val[2];
}
}
}
A = sum / (3 * pointNum);
A = A/255.0; if (A > 220.0)
{
A = 220.0;
}
printf("float: %f\n", A);
return A;
}
int PostprocDehaze::Execute(const std::vector& net_outputs,
const std::shared_ptr& model,
const CNFrameInfoPtr& package) {
if (net_outputs.size() != 1) {
std::cerr <output_shapes()[0];
auto data = net_outputs[0];
int height = sp.h();
int width = sp.w();
Mat mat = Mat(height,width,CV_32FC1, data);//网络输出透射图
std::cout<<"mat height::"<<height<<width<<std::endl;
Process(package,mat);
return 0;
}
void PostprocDehaze::Process(std::shared_ptr data, Mat mat) {
int width = mat.cols;
int height = mat.rows;
std::cout<<"data height::"<<height<<width<frame.ImageBGR();
Mat q, Dehaze;
double A = 0.0;//大气光值
imwrite("img.jpg",img); //得到原图
cv::resize(img, img, Size(width,height));//将原图大小调整为和网络输出大小相同
vector rgb;
split(img,rgb);
Mat dc=cv::min(cv::min( rgb.at(0),rgb.at(1)),rgb.at(2));//暗通道实际上是在rgb三个通道中取最小值组成灰度图
Mat kernel = getStructuringElement(cv::MORPH_RECT,Size(15,15));
Mat dark;
erode(dc,dark,kernel);//腐蚀就是最小值滤波
A = Acount(dark,img);//1.从暗通道图中按照亮度大小取前0.1%的像素。2.在这些位置中,在原始图像中寻找对应具有最高亮度点的值,作为A值。
q = Guidedfilter(img,mat);//引导滤波
Dehaze = Mat(height,width,CV_32FC3);
img.convertTo(img,CV_32FC3); //将得到的原图进行归一化以便后续计算
for (int i = 0; i<height; i++)
{ for (int j = 0; j<width; j++)
{
img.at(i, j)[0]=img.at(i, j)[0]/255.0;
img.at(i, j)[1]=img.at(i, j)[1]/255.0;
img.at(i, j)[2]=img.at(i, j)[2]/255.0;
}
}
for (int i = 0; i<height; i++)
{
for (int j = 0; j<width; j++)
{
Dehaze.at(i, j)[0]=(((img.at(i, j)[0]-A)/q.at(i, j))+ A)*255;
Dehaze.at(i, j)[1]=(((img.at(i, j)[1]-A)/q.at(i, j))+ A)*255;
Dehaze.at(i, j)[2]=(((img.at(i, j)[2]-A)/q.at(i, j))+ A)*255;
}
}
static int i = 0;
std::string img_name = std::to_string(i++) + ".jpg";
imwrite(img_name, Dehaze);
}
IMPLEMENT_REFLEX_OBJECT_EX(PostprocDehaze, Postproc)
} // namespacenet_outputs中可以获取网络输出,package中可以得到原图,流程如下:
a
Mat mat = Mat(height,width,CV_32FC1, data)
得到网络输出透射图t(x)
img = cv::Mat(data-> .height*3/2, data-> .width, CV_8UC1, img_data, data-> .strides[0]);
得到原图
Mat dc=cv::min(cv::min( rgb.at(0),rgb.at(1)),rgb.at(2));
暗通道实际上是在rgb三个通道中取最小值组成灰度图
A = Acount(dark,img);
1.从暗通道图中按照亮度大小取前0.1%的像素。 2.在这些位置中,在原始图像中寻找对应具有最高亮度点的值,作为A值。
q = Guidedfilter(img,mat);
引导滤波
Dehaze.at(i, j)[0]=(((img.at(i, j)[0]-A)/q.at(i, j))+ A)*255;
根据投射图和原图以及大气光值恢复去雾后的图像
4.图片路径
我自己的图片存放在
/detection-demo/test_dehaze/images
需要写一个files.list_image指明图片路径
5.改写配置文件dehaze_config.json
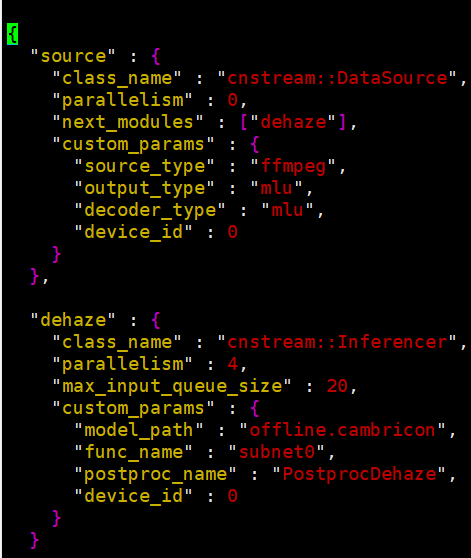
(a)next_modules:dehaze
(b)model_path:指明模型路径
(c)postproc_name:指明子类类名
6.运行脚本
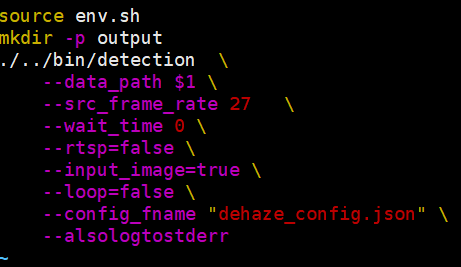
图片路径我们将以参数形式传入,当我们输入为图片时要将input_image改为true,同理,若输入为视频则将其改为false
7.编译运行
在目录/cnstream/build下进行
camke .. make -j8
运行
./run_dehaze.sh files.list_image
8.运行结果
我们以imwrite的形式将图片保存下来,视频也是一帧帧保存为图片,后续会再进行改写


热门帖子
精华帖子





 Ashelly
13 回复
Ashelly
13 回复
 三叶虫
6 回复
三叶虫
6 回复
 fengyunkai
1 回复
fengyunkai
1 回复



 goodchong
goodchong jyjyjyjyjy
jyjyjyjyjy Github
Github 开发平台
开发平台 文档中心
文档中心 新手必读
新手必读