打开微信,使用扫一扫进入页面后,点击右上角菜单,
点击“发送给朋友”或“分享到朋友圈”完成分享
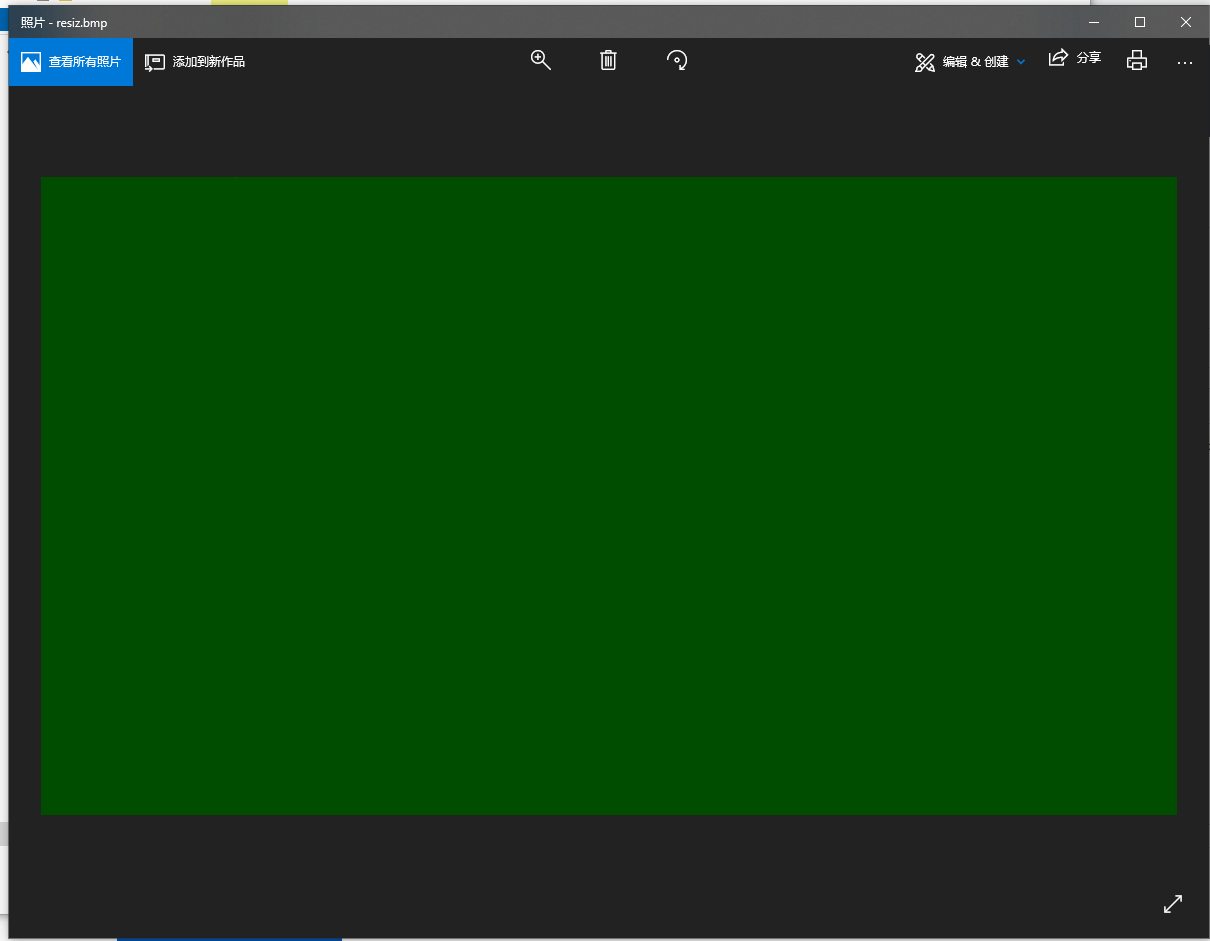
本人现在编写了一个函数。使用CNCV库将解码出来的cncodec 数据进行缩放和格式转换成Mat格式的图像再输出。确认输入的cncodec 数据是正确的(可保存成文件输出,图像显示正常)但是输出的画面是是全绿。
以下是源码
// 缩放到720P cncodec -> Mat
int decodeCambrian::decodeCambrian_resize(cncodec src ,cv::Mat *img){
//初始化
cnrtDev_t CV_dev;
cnrtQueue_t CV_queue = nullptr;
cncvHandle_t CV_handle = nullptr;
uint32_t batch_size = 1;
cncvContextInit(CV_dev, CV_queue, CV_handle);//缩放功能初始化
//参数转换
cncvImage srcImg; // 输入的图像信息
cncvImage dstImg; // 输出的图像信息
memset(&srcImg, 0, sizeof(srcImg));
memset(&dstImg, 0, sizeof(dstImg));
//cncodec to cncvImage
//【源数据】
srcImg.width=src .width;
srcImg.height=src .height;
srcImg.stride[0]=src .stride[0];
srcImg.stride[1]=src .stride[1];
srcImg.planeNum=src .planeNum;
srcImg.plane[0].size=src .height * src .stride[0];
srcImg.plane[1].size=(src .height/2)*src .stride[1];
memcpy(&(srcImg.plane[0].addr),(void *)(src .plane[0].addr),src .plane[0].size);
memcpy(&(srcImg.plane[1].addr),(void *)(src .plane[1].addr),src .plane[1].size);
// srcImg.plane[0].addr=malloc(srcImg.plane[0].size);
// srcImg.plane[1].addr=malloc(srcImg.plane[1].size);
srcImg.colorSpace=(cncvColorSpace)(src .colorSpace);
srcImg.pixelFmt=(cncvPixelFormat)(src .pixelFmt);
srcImg.depth=CNCV_DEPTH_8U;
//Mat to cncvImage
dstImg.width=img->cols;
dstImg.height=img->rows;
dstImg.stride[0]=(img->step);
dstImg.pixelFmt=CNCV_PIX_FMT_BGRA;//图像格式
dstImg.colorSpace=CNCV_COLOR_SPACE_BT_601;//颜色空间
dstImg.plane[0].size=(img->rows)*(img->step);
dstImg.plane[0].addr=malloc(dstImg.plane[0].size);
dstImg.planeNum=1;
dstImg.depth=CNCV_DEPTH_8U;
//参数获取
cncvImageDe or_t src_desc_yuv;//输入的图像参数
createImageDe or(&src_desc_yuv);
src_desc_yuv->width = srcImg.width;
src_desc_yuv->height = srcImg.height;
src_desc_yuv->depth = CNCV_DEPTH_8U;
src_desc_yuv->pixel_fmt = CNCV_PIX_FMT_NV12;
src_desc_yuv->color_space = (cncvColorSpace)(src .colorSpace);
src_desc_yuv->stride[0] = srcImg.stride[0];//地址
src_desc_yuv->stride[1] = srcImg.stride[1];
cncvImageDe or_t det_desc_rgba;//输出的图像参数
createImageDe or(&det_desc_rgba);
det_desc_rgba->width = dstImg.width;
det_desc_rgba->height = dstImg.height;
det_desc_rgba->depth = CNCV_DEPTH_8U;
det_desc_rgba->pixel_fmt = CNCV_PIX_FMT_BGRA;
det_desc_rgba->color_space = (cncvColorSpace)(src .colorSpace);
det_desc_rgba->stride[0] = dstImg.stride[0];
//感兴趣的区域(默认全局)
cncvRect *src_rois_yuv = (cncvRect *)malloc(batch_size * sizeof(cncvRect));
src_rois_yuv[0].x=0;
src_rois_yuv[0].y=0;
src_rois_yuv[0].w=srcImg.width;
src_rois_yuv[0].h=srcImg.height;
cncvRect *dst_rois_rgba = (cncvRect *)malloc(batch_size * sizeof(cncvRect));
dst_rois_rgba[0].x=0;
dst_rois_rgba[0].y=0;
dst_rois_rgba[0].w=(unsigned int)(dstImg.width);
dst_rois_rgba[0].h=(unsigned int)(dstImg.height);
printf("-------------------------------------------------\n\r");
printf(">>> srcImg width:%8d,height:%8d \n\r",srcImg.width,srcImg.height);
printf(">>> dstImg width:%8d,height:%8d \n\r",dstImg.width,dstImg.height);
printf("-------------------------------------------------\n\r");
printf("src_rois_yuv :%8d,%8d,%8d,%8d \n\r",src_rois_yuv[0].x,src_rois_yuv[0].y,src_rois_yuv[0].w,src_rois_yuv[0].h);
printf("dst_rois_rgba:%8d,%8d,%8d,%8d \n\r",dst_rois_rgba[0].x,dst_rois_rgba[0].y,dst_rois_rgba[0].w,dst_rois_rgba[0].h);
printf("-------------------------------------------------\n\r");
//计算工作空间大小
void *workspace_switch = nullptr;
size_t workspace_size_switch;//工作空间大小
cncvGetResizeConvertWorkspaceSize(batch_size,
src_desc_yuv,
src_rois_yuv,
det_desc_rgba,
dst_rois_rgba,
&workspace_size_switch);
CNRT_CHECK(cnrtMalloc((void **)&(workspace_switch), workspace_size_switch));//在MLU设备上分配内存,创建工作空间
//相关工作内存空间创建
void **srcYDev = NULL;//yuv的Y值,指向MLU上源图像y数据的指针
void **srcUVDev = NULL;//yuv的UV值,指向MLU上源图像UV数据的指针
void **dstDev = NULL;//指向用于存储输出数据的MLU空间的指针
CNRT_CHECK(cnrtMalloc((void **)&srcYDev, batch_size * sizeof(void *)));//在mlu220中创建输入图像内存空间
CNRT_CHECK(cnrtMalloc((void **)&srcUVDev, batch_size * sizeof(void *)));
CNRT_CHECK(cnrtMalloc((void **)&dstDev, batch_size * sizeof(void *)));
//主机内存空间(交换变量)
size_t srcYDataSize = src .height * src .stride[0];
size_t srcUVDataSize = (src .height/2) * src .stride[1];
size_t dstDataSize = (img->rows)*(img->step);
void **srcYDev_tmp = (void **)(malloc(batch_size * sizeof(void *)));
void **srcUVDev_tmp = (void **)(malloc(srcYDataSize * sizeof(void *)));
void **dstDev_tmp = (void **)(malloc(dstDataSize * sizeof(void *)));
//主机到模块
CNRT_CHECK(cnrtMalloc((void **)&(srcYDev_tmp[0]), srcYDataSize));//在mlu220中创建输入图像内存空间
CNRT_CHECK(cnrtMalloc((void **)&(srcUVDev_tmp[0]), srcUVDataSize));
CNRT_CHECK(cnrtMalloc((void **)&(dstDev_tmp[0]), dstDataSize));
CNRT_CHECK(cnrtMemcpy(srcYDev_tmp[0],srcImg.plane[0].addr ,srcYDataSize ,CNRT_MEM_TRANS_DIR_HOST2DEV));
CNRT_CHECK(cnrtMemcpy(srcUVDev_tmp[0],srcImg.plane[1].addr,srcUVDataSize ,CNRT_MEM_TRANS_DIR_HOST2DEV));
//将主机的内存信息映射到模块的内存中
CNRT_CHECK(cnrtMemcpy(srcYDev,srcYDev_tmp,batch_size*sizeof(void *),CNRT_MEM_TRANS_DIR_HOST2DEV));
CNRT_CHECK(cnrtMemcpy(srcUVDev,srcUVDev_tmp,batch_size*sizeof(void *),CNRT_MEM_TRANS_DIR_HOST2DEV));
CNRT_CHECK(cnrtMemcpy(dstDev,dstDev_tmp,batch_size*sizeof(void *),CNRT_MEM_TRANS_DIR_HOST2DEV));
//执行图像格式转换(当前版本为0.2.118)
CNCV_CHECK(cncvResizeConvert( CV_handle, // 上下文指针
batch_size, //
src_desc_yuv, //
src_rois_yuv, //
(void **)srcYDev, //
(void **)srcUVDev, //
det_desc_rgba, //
dst_rois_rgba, //
(void **)dstDev, //
workspace_size_switch, //
workspace_switch, //
CNCV_INTER_BILINEAR)); //
CNRT_CHECK(cnrtSyncQueue(CV_queue));//同步队列
//获取结果
//目的地址、源地址,大小,方向
CNRT_CHECK(cnrtMemcpy(dstImg.plane[0].addr,dstDev_tmp[0],dstDataSize, CNRT_MEM_TRANS_DIR_DEV2HOST));//模块到主机
printf(">>>dstImg info:w=%d,h=%d, planeNum=%d, addr=%llu,size=%d \n\r ",
dstImg.width,
dstImg.height,
dstImg.planeNum,
dstImg.plane->addr,
dstImg.plane->size);
//转换图像格式
cncvStatus_t status;
status = cncvutils::cncvImageToMat(dstImg, *img);//cncvImage to Mat
if (status != CNCV_STATUS_SUCCESS) {
ERROR("error, cannot translate to cv::Mat");
} else {
LOG("transform cncvImage to cv::Mat success!");
//printf(">>>dstImg.pixelFmt=%d,\n\r",dstImg.pixelFmt);
}
//释放内存
free(src_rois_yuv);
free(dst_rois_rgba);
CNRT_CHECK(cnrtFree(srcYDev));
CNRT_CHECK(cnrtFree(srcUVDev));
CNRT_CHECK(cnrtFree(dstDev));
CNRT_CHECK(cnrtFree(workspace_switch));
CNRT_CHECK(cnrtFree(srcYDev_tmp[0]));
CNRT_CHECK(cnrtFree(srcUVDev_tmp[0]));
CNRT_CHECK(cnrtFree(dstDev_tmp[0]));
free(srcYDev_tmp);
free(srcUVDev_tmp);
free(dstDev_tmp);
delete src_desc_yuv;//回收内存
delete det_desc_rgba;
cncvDestroyImage(&srcImg);
cncvDestroyImage(&dstImg);
cncvDestroy(CV_handle);
cnrtDestroyQueue(CV_queue);
cnrtDestroy();
return 0;
}我该如何去排查与处理这个问题呢?谢谢!~
热门帖子
精华帖子





 Ashelly
13 回复
Ashelly
13 回复
 三叶虫
6 回复
三叶虫
6 回复
 fengyunkai
1 回复
fengyunkai
1 回复



 goodchong
goodchong jyjyjyjyjy
jyjyjyjyjy Github
Github 开发平台
开发平台 文档中心
文档中心 新手必读
新手必读